



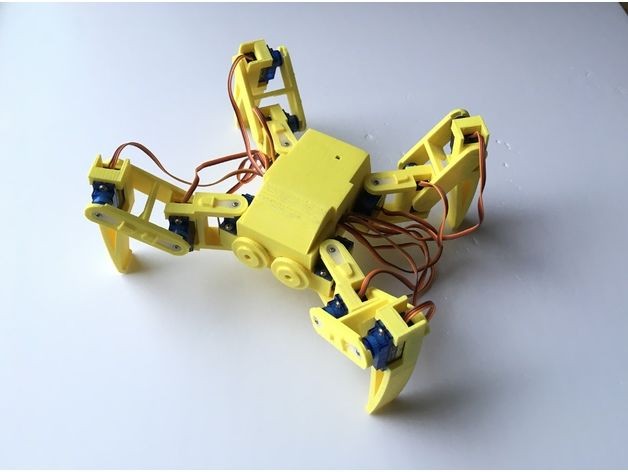
这是一款使用Arduino类控制板的廉价3D打印12 DOF四足机器人。它有两种播放模式。一种是自主驾驶模式,机器人行走并随机执行动作。这是默认值。另一种是控制模式,其中机器人通过BLE技术由iPhone或Android手机控制。这个页面应该指导每个人轻松制作一个。
第1步:打印3D模型

下载3D打印的STL模型文件。用于打印的模型,建议参数如下。
底部/顶部厚度:1mm
外壳厚度:1.2mm
ayer高度:0.2mm填充
密度:10%
支持:有
附着类型:裙边
第2步:软件
软件可免费下载:
Arduino代码(文件内已包含)
Apple Store上的goBLE iOS应用程序(主板卖家可提供)
适用于Google Play的PlayBLE Android应用(主板卖家可提供)
通过Arduino软件中的open firmware.ino上传Arduino代码,请参阅IOS应用程序上的步骤10和Android应用程序上的步骤11来控制机器人。
对于HuaDuino,在Arduino IDE软件中:
电路板选择:“Arduino Nano”,用于AVR板的处理器“ATmega328”支持1.6.20或更高版本。
电路板选择:“Arduino Nano”,处理器“ATmega328(Old Bootloader)”用于AVR板支持1.6.21或更新版本。
第3步:硬件
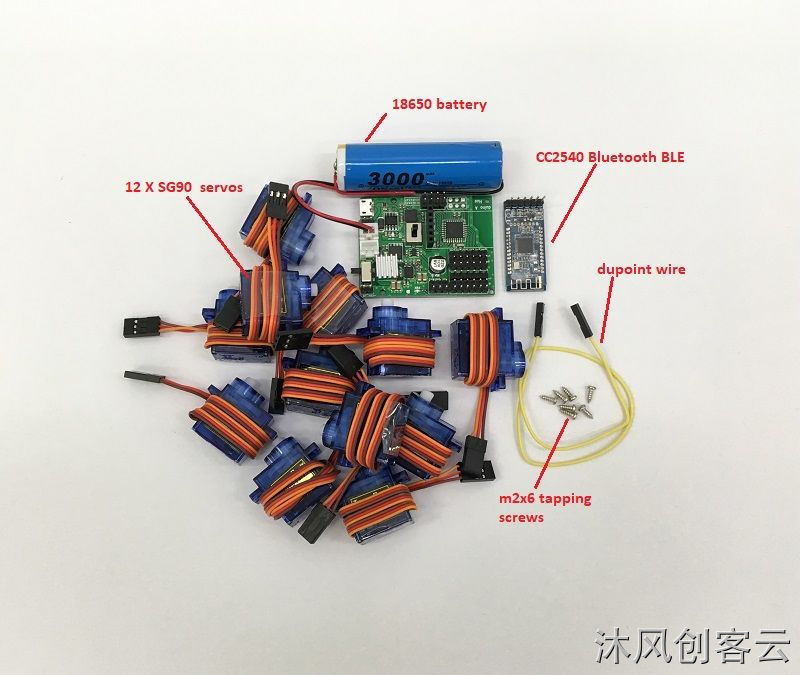
这些组件可以在网上商店中找到。
一个HuaDuino主板,Arduino Nano兼容增强功能。它将所有内容集成在一块PCB上。人们用它制作机器人要容易得多。嵌入式电池充电电路,电池充电更方便。
一个3.7V 18650锂离子电池或电池组与XH2.54连接器,如果要较长的运行时间得到一个包与两个并联18650。您可能想要使用这个18650电池座。然而,使用3.7V 10440锂离子和3.7V锂聚合物电池尺寸不大于W35mm,.0L70mm和T60mm也是可以的。
12 x Tower Pro SG90或兼容的9g伺服系统。
一个dupoint线或任何你能找出连接两个引脚
一些m2x6自攻螺钉
一个BT-05 CC2540蓝牙BLE模块 -这是可选的,如果您不需要应用程序的控制。波特率需要设置为115200.对于iOS应用,服务UUID必须设置为0xDFB0,并且特性必须设置为0xDFB1。以下是自动执行此操作的代码。附件是用于配置CC2540的AT命令集的参考。
假设BLE默认波特率为9600,以下Arduino程序发出AT命令设置BLE模块服务UUID,特征ID和波特率。为了在HuaDuino下面的代码中运行模块,S1开关必须设置为BT位置。
void setup(){
Serial.begin(9600); //更改以适合您的BLE初始baud_rate
Serial.println( “AT + UUID0xDFB0 \ r”); // uuid
延迟(50);
Serial.println( “AT + CHAR0xDFB1 \ r”); //特征
延迟(50);
Serial.println( “AT + BAUD8 \ r”); //将波特率设置为115200}void loop(){}将Arduino草图上传到HuaDuino进行BLE控制的步骤如下
插入BLE模块,将S1切换到USB侧,打开huaduino
上传上述模块安装程序
关闭huaduino,将S1切换到BT侧
打开huaduino,让ble模块安装程序在几秒钟内运行。
将S1切换到USB侧
上传机器人程序
将S1切换回BT侧,机器人现在可以通过BLE控制
第4步:安装伺服系统和控制板
第5步:腿
第6步:伺服接线
连接到HuaDuino的数字引脚如下:
D2到右前方股骨伺服
D3到右前方胫骨伺服
D4到右前方的coxa伺服
D5向后右股骨伺服
D6向后右胫骨伺服
D7向后右舵伺服
D8到左前方股骨伺服
D9到左前胫骨伺服
D10到左前方的coxa伺服
D11向后左股骨伺服
D12向后左胫骨伺服
D13向后左舵伺服
第7步:校准
使用A5和3.3V引脚之间的母 - 母双绞线,机器人伺服器将设置为默认参考角度。这是安装伺服系统并使伺服臂加盖在正确角度的状态。
步骤8:安装伺服臂
将母 - 雌双绞线连接在A5和3.3V引脚之间,将伺服臂放在伺服轴上
第9步:完成
将CC2540蓝牙BLE模块插入主板的蓝牙连接器,然后将S1开关滑动到BT侧,最后用顶盖和眼睛关闭机器人。
第10步:使用iPhone手机控制

要成功完成此部分,您必须配置CC2540蓝牙BLE模块,请参阅步骤3 - 硬件
打开iOS应用程序并关闭机器人
几秒钟之后,应该完成机器人和iPhone之间的BLE配对,你会看到连接符号变为绿色
按下顶部中间虚拟按钮将机器人切换到控制模式
按下底部中间虚拟按钮将返回自主自行走模式
第11步:使用Android手机控制
在机器人按下连接符号关闭顶部边缘时打开Android应用程序
几秒钟之后,您应该看到列出的BLE设备并选择它,连接符号在成功时应变为蓝色
按下顶部中间的虚拟按钮,它将切换到控制模式
按下底部中间虚拟按钮将返回自主自行走模式
第12步:电池充电

将5V电源micro USB线插入机器人USB端口
红灯表示正在充电
绿灯表示充电完成




 冀公网安备 13010402001320号
冀公网安备 13010402001320号