





此项目来自T站,有改进。制作过程很曲折,大家耐心看:
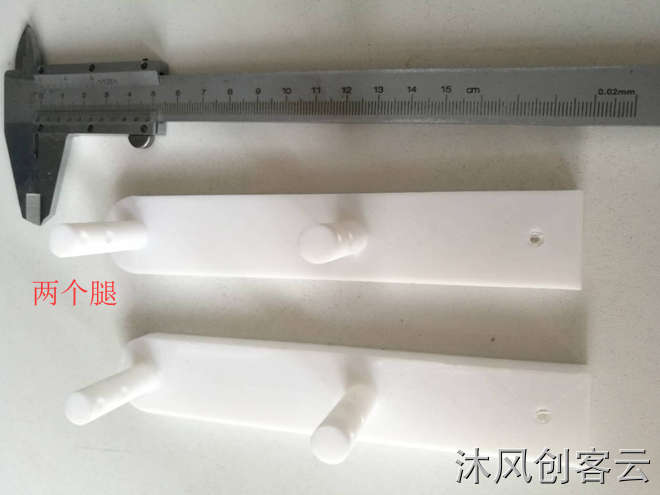
先来几张全部打印件的全家福:




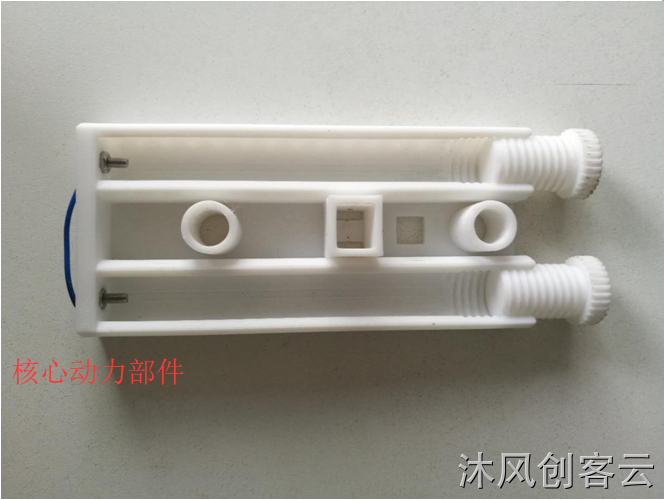
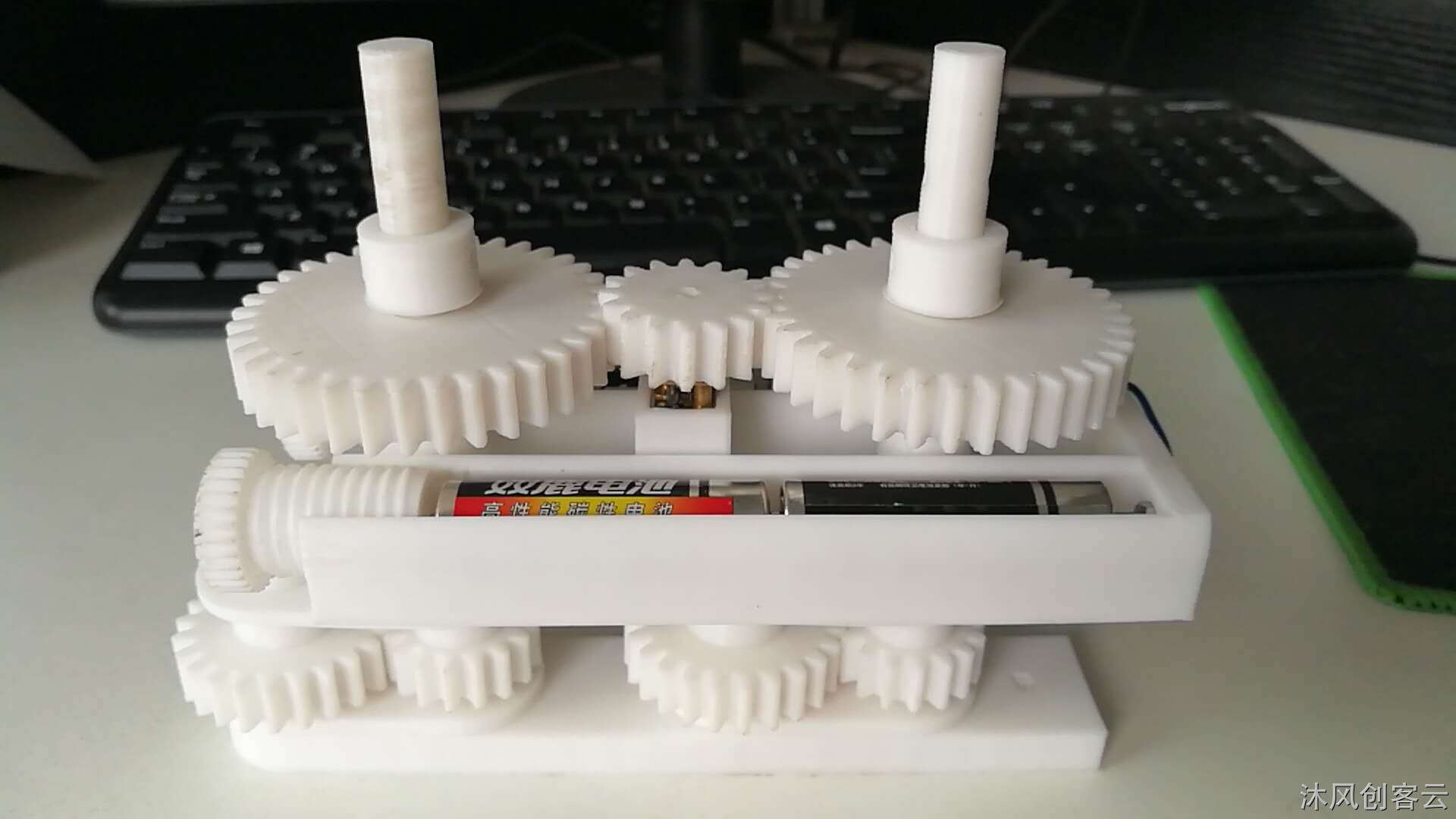
用来安装电池、传动轴的。



全程你只需要用到一个工具

这里有几点建议:
1.用比较长的螺丝刀,这样犄角旮旯的地方会比较好用力。
2.打印件最好用几种不同颜色的耗材打印,这样会好看很多。请忽视我懒得换料,全部使用白色耗材打印的
你需要准备的家伙:

数量 | 项目 |
1 | DC 6V 30RPM微型减速齿轮电机 |
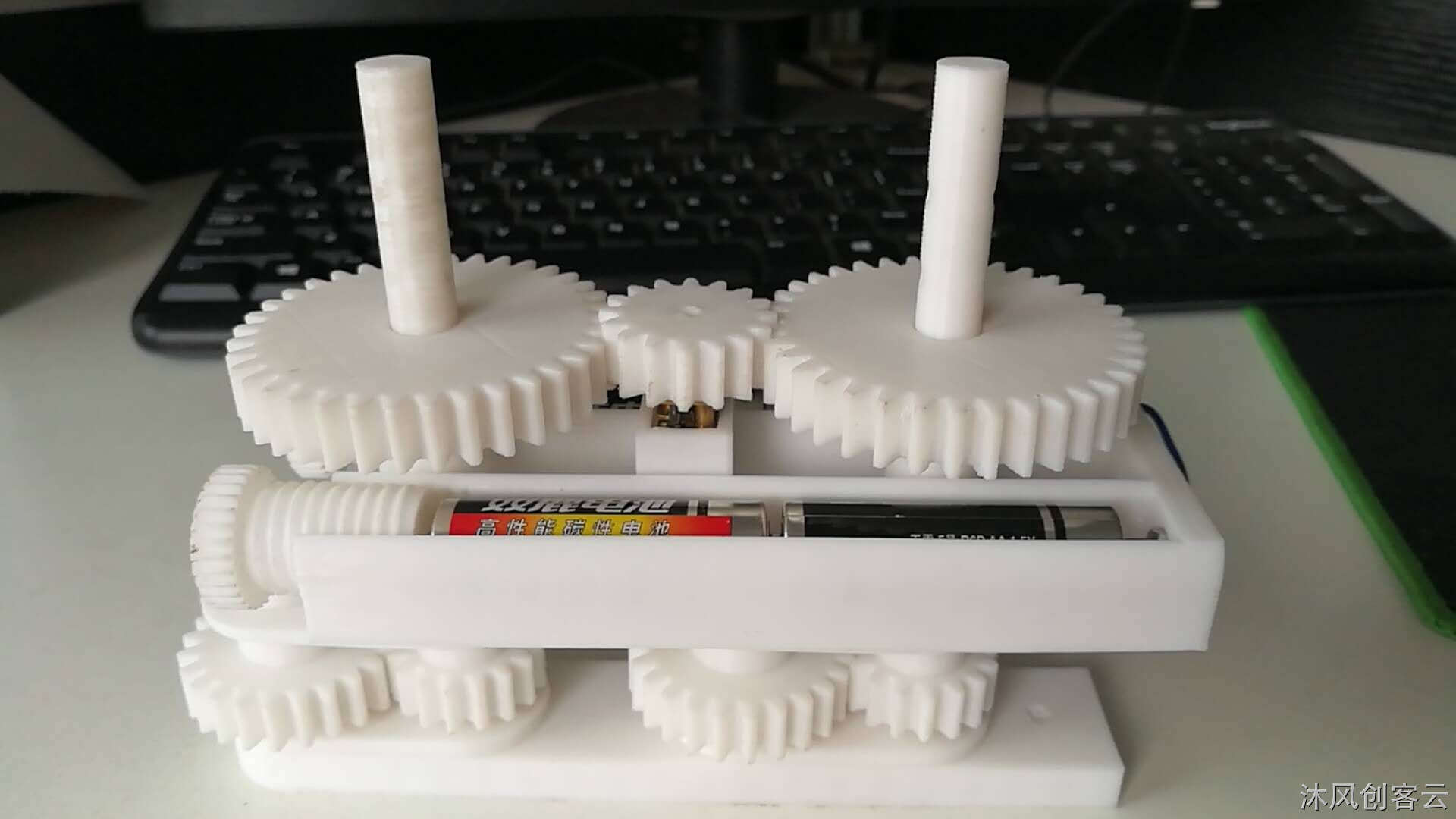
4 | AA电池 |
20 | 公制十字头M3x12螺钉 |
2 | 公制M3螺母 |
2 | 跳线或短线 |
1 | 办公回形针或短铜丝 |
下面就进行正式的安装:
1、将两个小号齿轮装到两个杆的底部。请注意,杆中的孔不对称。将轮子安装到接触3D打印机平台的杆的末端。用螺丝固定轮子。

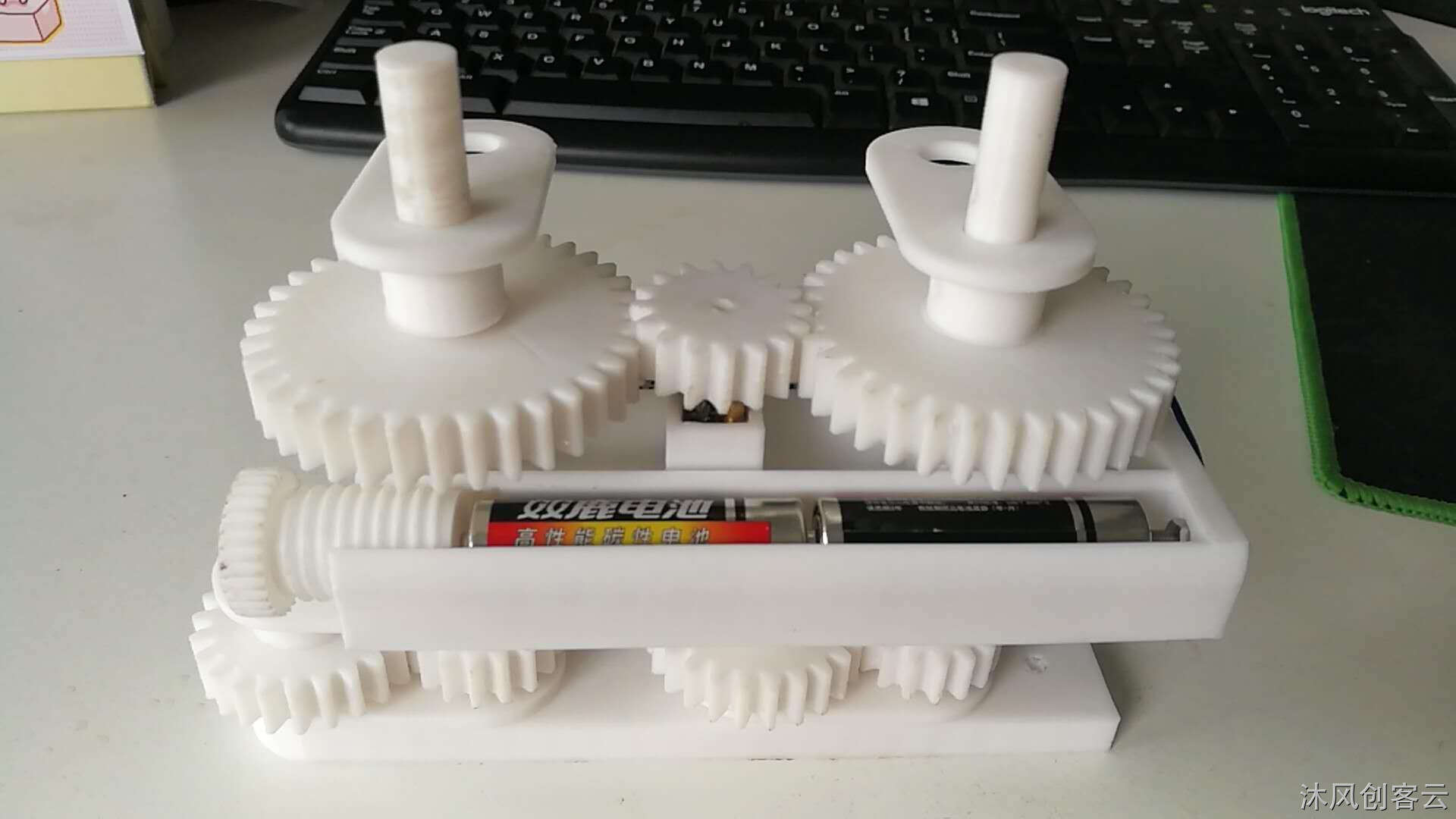
2、将两条腿中的一条放在前方,圆形端指向左边,将两个衬套安装到支腿的两个轴上,如下所示。

3、将两个中号齿轮安装到衬套上,并用螺钉固定。
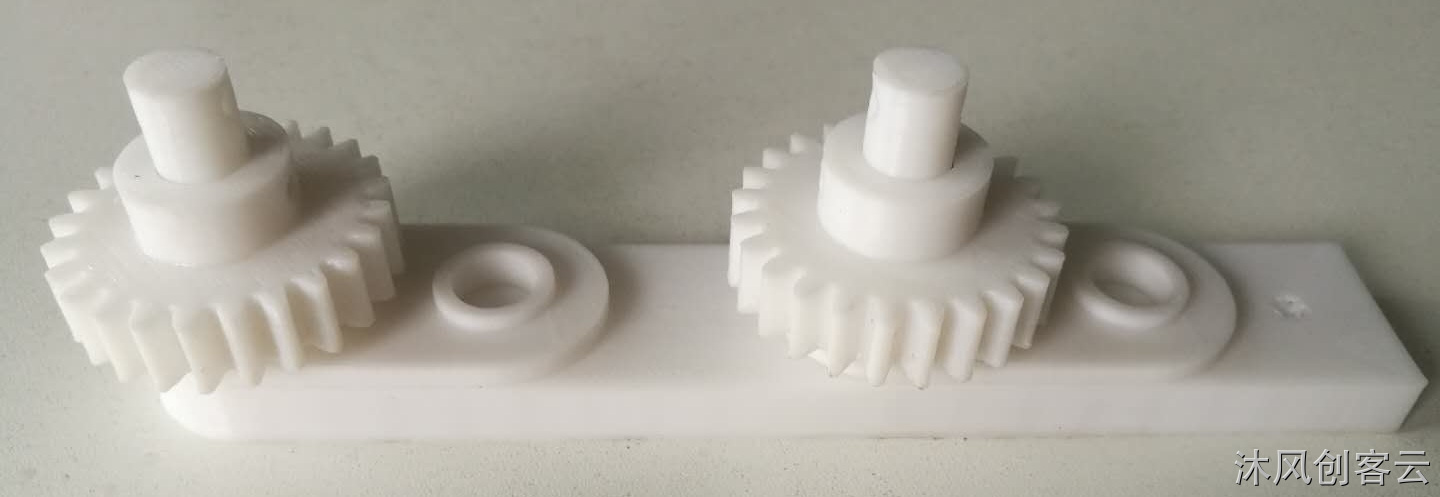
4、将步骤1中安装好的传动轴链接在上边,如下所示。

5、安装两个保持架

6、将两个短制动管安装在中号齿轮上,并将两个长制动管安装在小号齿轮上,如下所示。用螺丝固定所有四个止动管。

这里如果不好安装螺丝,可以先转动错位一点,安装好,再拧回去:

7、好了,至此,已经完成三分之一。下边我们来组装动力部分:
将电机齿轮(带D字孔的),安装进减速电机:

8、插入马达插在马达座上,让电线从电动机槽的底部的两个小孔出来。在马达座的侧面安装两个螺钉,用两个螺母固定在内侧。这两个螺丝是电导体。它们必须用导电材料相互连接。我们使用了一小段铜线。

9、将刚才组装好的部件和马达座链接:

10、安装两个大号齿轮:
11、将两个长止动管安装到杆上,用螺丝固定
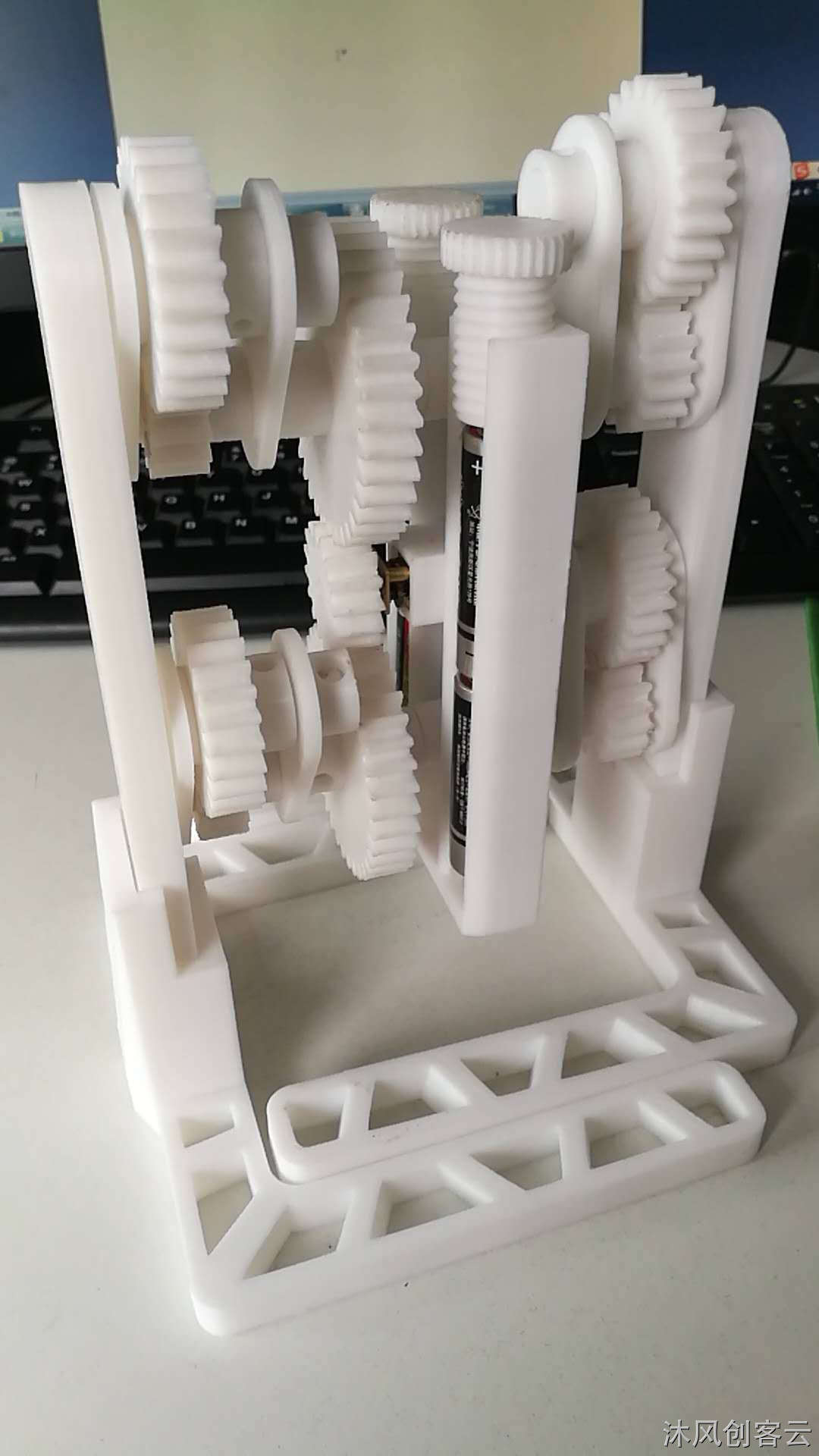
12、将第二对支架以相对于第一对支架90°的角度安装到杆上。
13、将第二对小号齿轮安装到杆上,用螺丝固定。

14、使用第二条腿,第二对衬套和第二对中号齿轮,重复步骤5,6和7,但将衬套相对于腿以90° 安装。

15、安装最后一对短止动管,用螺丝固定。并且将两只大脚安装上,大功告成!
16通电测试!
发现然鹅并不会动。无奈脸~
检查过后我认为,此小型减速机扭矩过小,无法带动机器人的运转。
于是乎我买了这个~

扭矩是很大了,但是问题来了
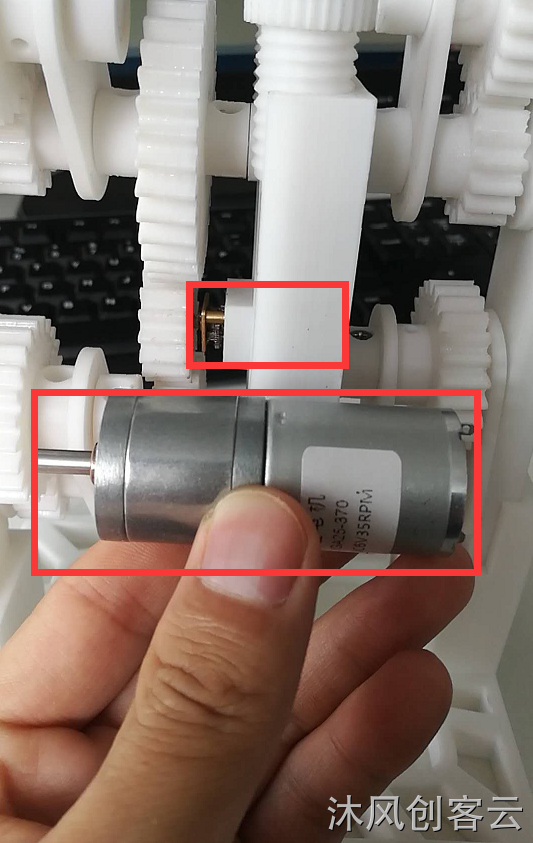
新买的电机比原来小型电机长不止一倍!
人生的意义在于折腾,no zuo no die, don`t cry
紧接着,我重新设计了电机座和传动轴
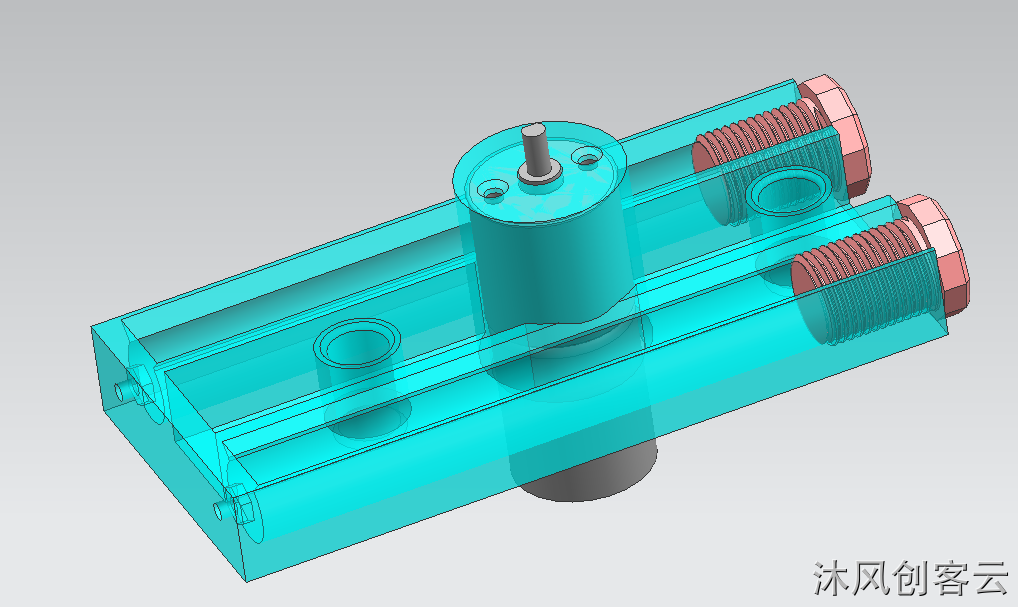
把他打印出来!组装上就可以了!视频稍后上传。





 冀公网安备 13010402001320号
冀公网安备 13010402001320号