

DIY攻城狮
已分享2份图纸


(1/6)SmallRobotArm

(2/6)SmallRobotArm2

(3/6)SmallRobotArm5

(4/6)SmallRobotArm3

(5/6)SmallRobotArm4

(6/6)SmallRobotArm-2维码






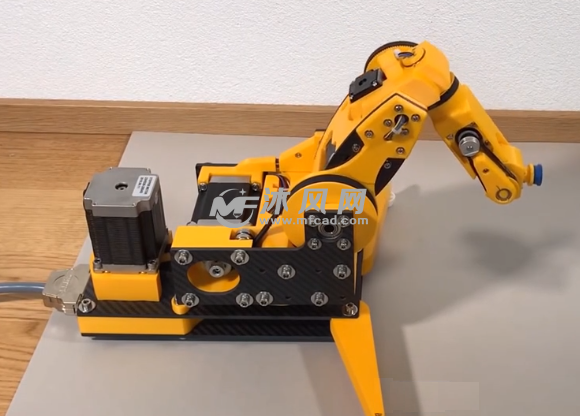
这个开源的6自由度机械臂项目是基于步进电机控制的,由2个57步进电机,1个42步进电机,2个28步进电机和1个20步进电机组成,传动方式采用同步带传动,具有更高的精度;
在主控板方面由Arduino Mega2560配合3D打印机扩展板RAMPS1.4组成。

在驱动器方面,57步进电机和42步进电机由TB6560驱动,28步进电机和20步进电机由A4988驱动;
图中黑色零件为碳纤维板材加工而成,在实际应用可也可用高强度塑料打印而成,其它零件均可由3D打印机打印。良好的结构设计,使其具有较高的定位精度。
固件里写有6自由度机械臂的运动学正解和逆解的算法,有基础的DIY爱好者可自行解读,然后根据自己的需要进行二次开发;同时该项目开发者还开发了蓝牙版的固件,并开发了手机APP(安卓版),使我们可以用手机连接控制板来操作6自由度机械臂。
如需控制软件,请关注微信公众号:DIY攻城狮,即可获得全部技术资料。

| 缩略图 | 名称 | 格式 | 大小(KB) |
|---|

CopyRight 2007-, mfcad.COM, Inc. All Rights Reserved
冀ICP备18014069号
 冀公网安备 13010402001320号
冀公网安备 13010402001320号









