






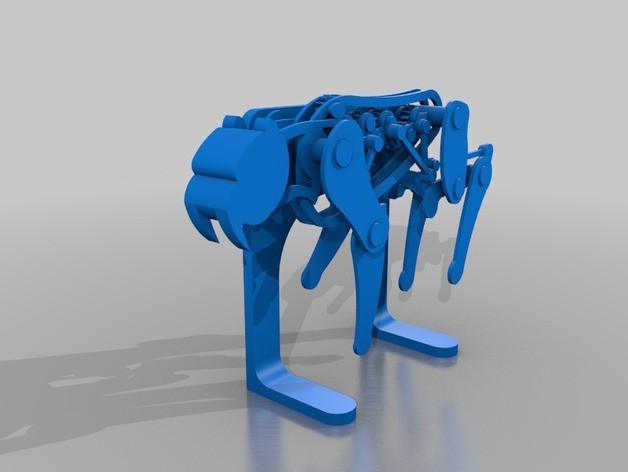
打印所有部件,如“Assembly.skp”或“Assembly.stl”中所示。
根据我们的计算,这个“剑齿虎”每2秒走1步,相当于每分钟30步,每小时1800步,每天43300步,每年15,768,000步。后腿大步为5英寸,相当于大约1500英里不停
根据需要测试配合和装饰,锉刀,沙子等所有部件,以便移动表面平滑移动,并紧密贴合非移动表面。根据您选择的颜色和打印机设置,将需要或多或少的修剪,归档和/或打磨。
按Assembly.skp(或Assembly.stl)进行汇编。
我开始将两个半框一起按下(“Frame Left.stl”和“Frame Right.stl”),然后逐个插入齿轮(“Gear.stl”)及其相关部件(“Arm Axle”。 stl“,”Cap Axle.stl“或”Cap Axle Eccentric.stl“)进入装配好的框架并测试每个齿轮组件,以确保每个齿轮组件旋转几乎零努力和零障碍,如果它没有,我删除了最近安装的齿轮组件并修剪,归档,打磨等,直到它完成。完成后,您应该能够轻松地旋转整个齿轮系,同时握住“Cap Motor.stl”并手动旋转整个组件。如果没有,请拆卸并重复此过程,因为这是非常重要的一步。
我还注意到,当在Ultimaker 2上打印时,一些销和轴组件不希望留在各自的插座中(这个设计用于复制器2,它不具备Ultimaker 2的精度) )。我会努力增加这些组件的尺寸,但是对于当前的解决方案,在六角形销的一个表面上涂上一小块厚的氰基丙烯酸酯胶,让它固化(一步促进剂加速这个过程),然后更换它。
另一个非常重要的步骤,非常注意组件“Cap Axle Eccentric.stl”和“Arm Axle.stl”的初始方向,如齿轮系中的“Assembly.skp”或“Assembly.stl”所示因为这些方向对于Sabre运动,对齐和间隙至关重要。
用凡士林润滑所有运动部件。
将电机接线,使其从电机轴看逆时针旋转。
我的军刀运行在1.5到6 VDC之间。它设计用于3 VDC的选定电机,可在降低噪音的同时提供良好的运动。为了中断,润滑后,我在6 VDC下运行原型2小时,然后将电压降至3.0 VDC。他们已经在3 VDC运行了一个多星期。
如果问题评论,祝你好运!
更新:
1)我上传了一个更正的“Head Right.stl”。对不起,这已经造成了任何问题。
更新:SABER.ZIP包含我可以找到的所有草图设计文件。
材料和方法
1)电机:
16mm DC 6V 60RPM速度扭矩齿轮箱
变速箱尺寸:26 x 15 x 12mm (长*宽*高);外形尺寸:16 x 57mm (D * H)
2)电源插座
3)3.0 V dc电源
我用过的工具和用品:
1)橡皮锤。
2)小台钳。
3)平冲套装。
4)造型刀。
5)小文件。
6)砂纸。
7)滑动钳。
8)尖嘴钳。
9)浓氰基丙烯酸酯胶。
10)氰基丙烯酸酯促进剂。




 冀公网安备 13010402001320号
冀公网安备 13010402001320号