
简介:

该模型足够小,可以在大多数3D打印机上打印。但由于体积小,它需要的部件也非常小,因此在打印和装配过程中需要更高的精度。
需要注意的是,这种设计中使用的电机虽然价格相对便宜,但在转动起来声音比较大!
使用Autodesk Fusion 360进行设计,使用Cura 3.2.1进行切片,并在Ultimaker 2+ Extended和Ultimaker 3 Extended上使用PLA进行打印。
第1步:购买并打印零件。
我购买了一个300RPM金属迷你直流6V减速电机,一个6vdc电源和一个phono插孔供电。
3D打印文件下载地址://ck.mfcad.com/model/s139953.html 或者在页面右侧进入下载页→
第2步:组装马的身体和电机




将一小段红线焊接到齿轮电机“+”端子上,将一小段黑线焊接到齿轮电机“ - ”端子上。
将齿轮电机完全按入“Housing Motor.stl”的底部。
使用4个“Screw, 4 by 3mm, 4.4mm Shoulder.stl”将4“Spacer Body.stl”连接到“Body Right.stl”。














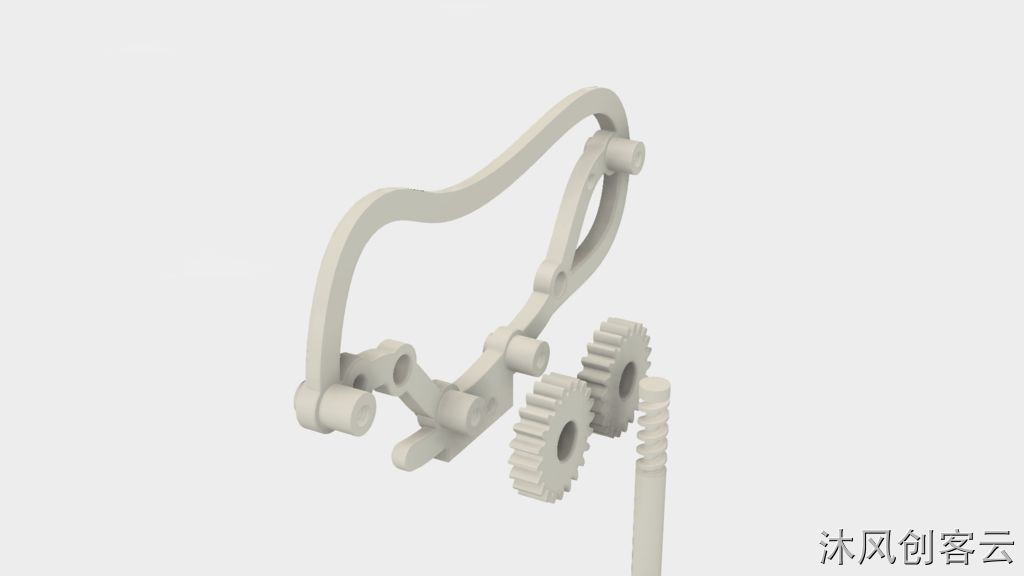
如图所示,将2“Gear Idler, (22 Teeth).stl”放置在2个车身垫片上,
如图所示,在齿轮之间定位“Gear Worm.stl”。通过将蜗轮滑入电机壳体并将蜗轮与电机轴啮合(可能需要旋转蜗轮以使其与电机轴对齐),将组件与电机壳体配合,然后将组件连接到电机轴上。电机外壳使用2“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”。
将2个“Gear, (22 Teeth).stl”连接到车身组件上,前齿轮使用1个“Cam Front.stl”,后齿轮使用1个“Cam Rear.stl”。确保两个凸轮都指向正上方。
将“Head.stl”和“Tail.stl”定位在车身上,然后使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Body Left.stl”连接到电机外壳上。
使用4个“Screw, 4 by 3mm, 4.4mm Shoulder.stl”将车身左侧安装到车身右侧。
将剩余的“Cam Front.stl”和“Cam Rear.stl”按到组件上。确保这些凸轮从相应的计数器部件旋转180度(例如,指向正下方)。
步骤3:组装并连接前腿。













首先组装右前腿。
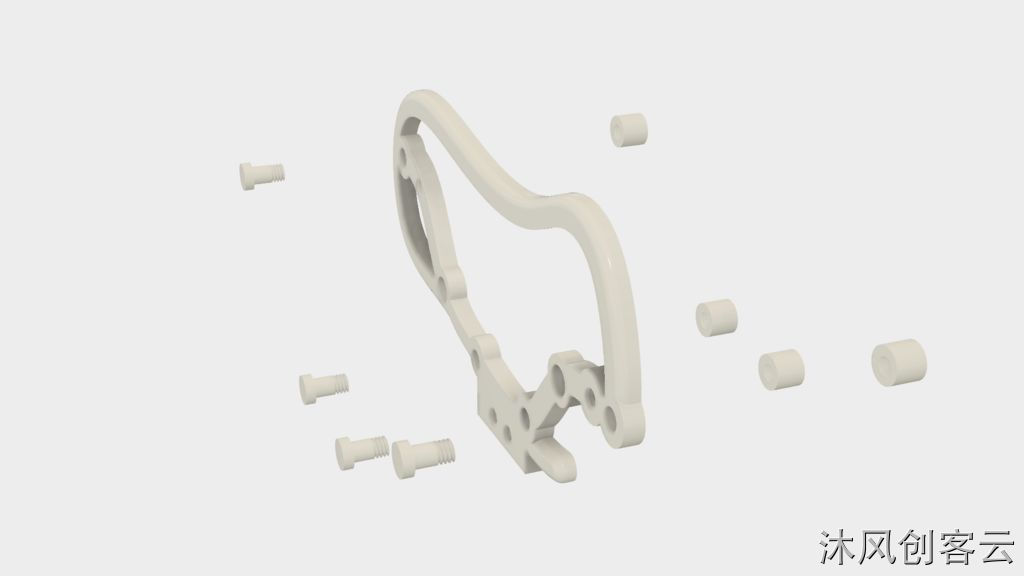
使用2 个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Arm Front Right.stl”和“Leg Front Lower Rear.stl”连接到“Leg Front Upper Rear.stl”。
使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl“将”Leg Front Upper Front.stl“连接到组件上。
使用1个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Leg Front Lower Front.stl”连接到组件上。
使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Hoof Front.stl”连接到组件上。
使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将右前腿组件连接到主体组件上。确保头部位于“Arm Front Right.stl”上的支架上方。





将左前腿组装成右前腿的镜像,然后使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将其安装到组件上,确保头部位于“Front Left.stl“上。
步骤4:组装并安装后腿。












首先组装右后腿。
使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Arm Rear.stl”和“Leg Rear Lower Front.stl”连接到“Leg Rear Upper Front.stl”。
使用3个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Leg Rear Upper Right Right.stl”和“Leg Rear Lower Rear.stl”连接到组件上。
使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将“Hoof Rear.stl”连接到组件上。
使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将右后腿组件连接到主体组件上。确保尾臂位于“Leg Rear Upper Rear Right.stl”上的支架下方。



将左后腿组装成右后腿的镜像,然后使用2个“Screw, 4 by 3.8mm, 4.4mm Shoulder.stl”将其安装到组件上,确保尾臂位于支架下方“Leg Rear Upper Rear Left.stl“。
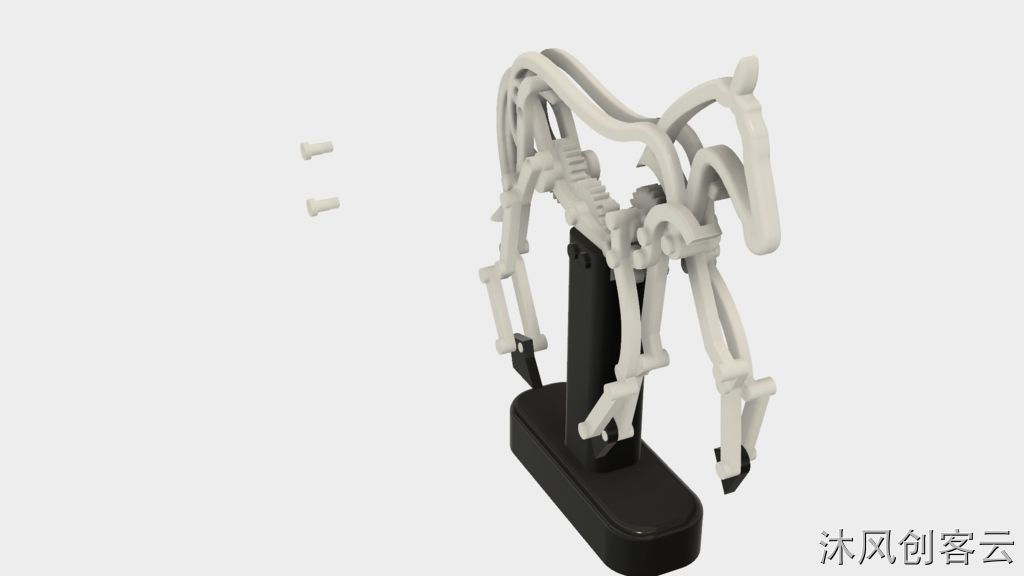
第5步:最后的组装

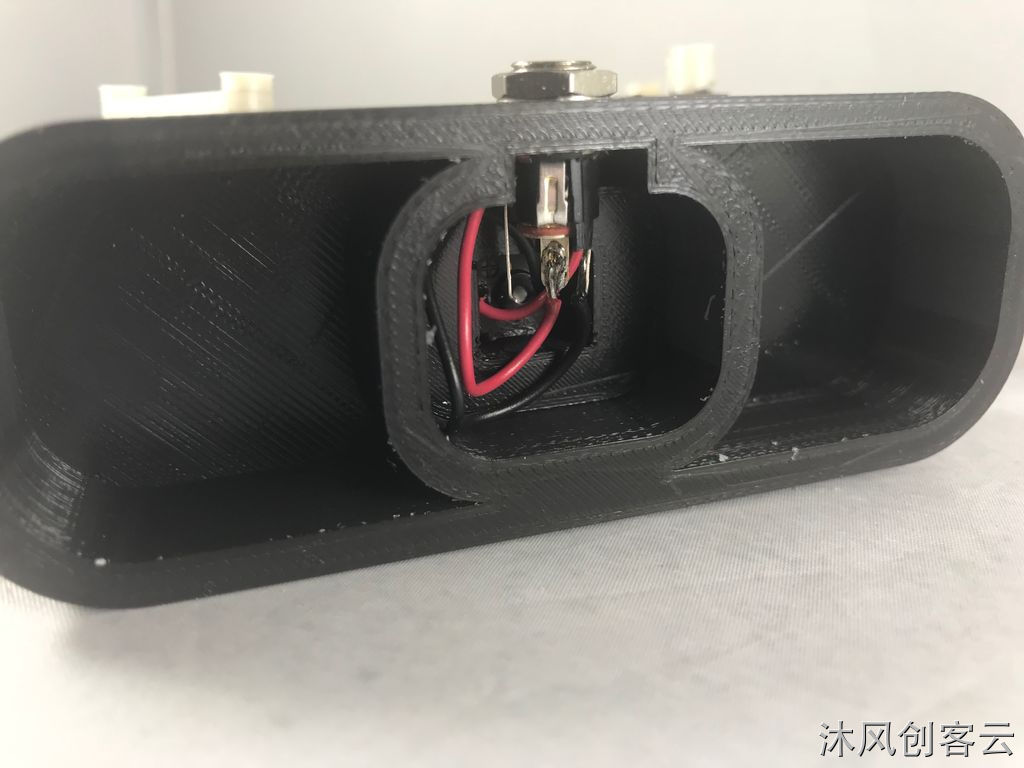
我将一个插头连接到底座,然后将电机红线和黑线连接到插头。插上电源,他就可以跑起来了!
希望你喜欢!