

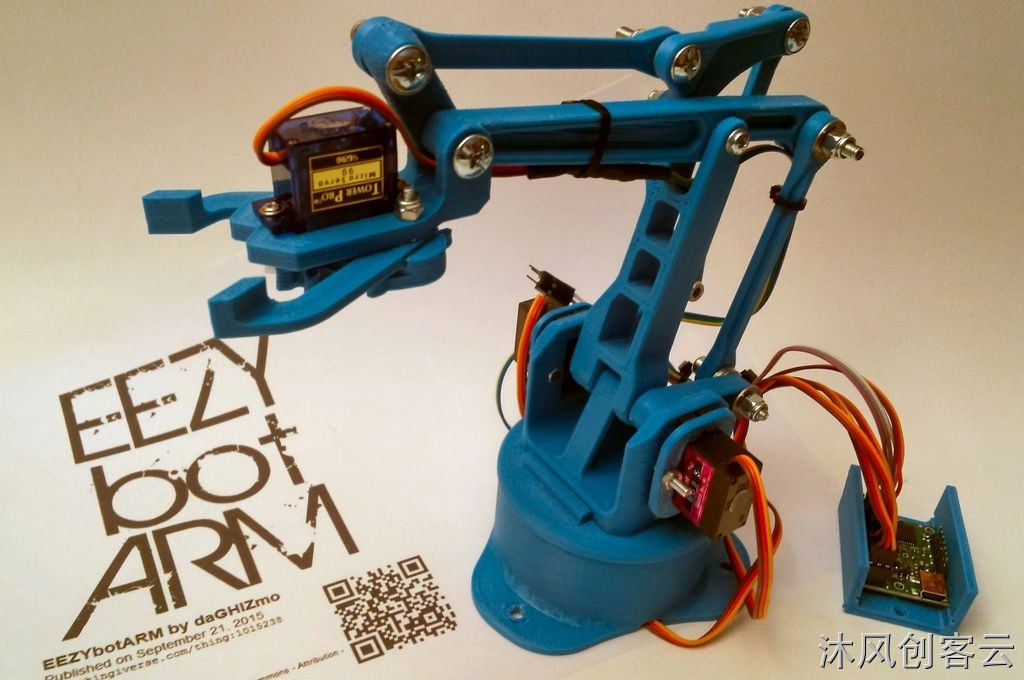
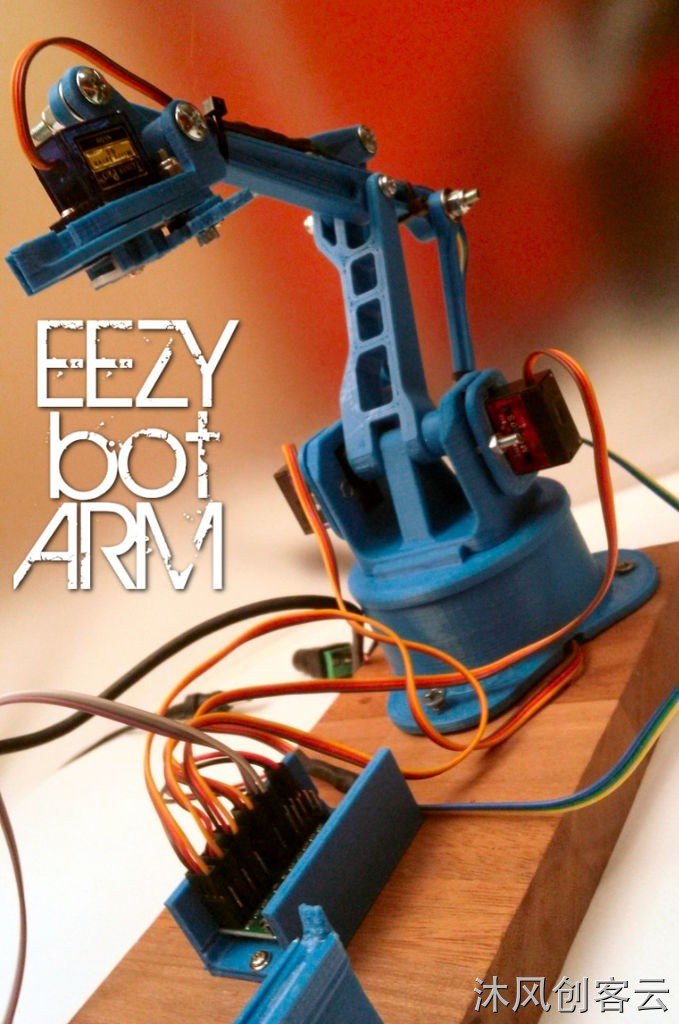

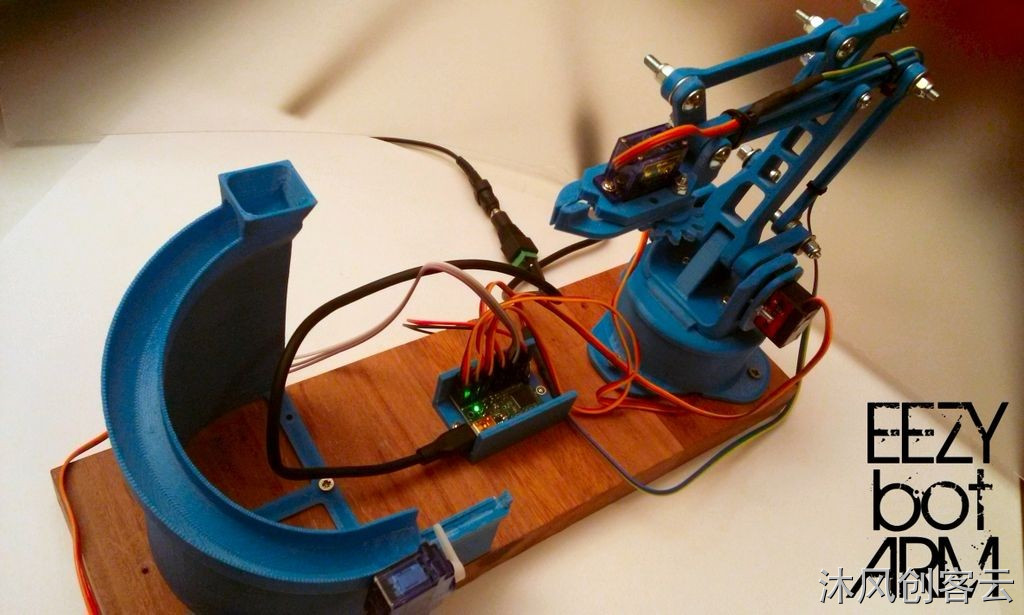




简介:EEZYbotARM
这是一个3DPrinted机器人手臂。
设计意图是制作一些“易于”构建并且相当便宜的东西
它使用MG90S小型伺服系统来驱动运动学连接,使用Pololu mini maestro 12来控制伺服系统(但这是我的选择,其他任何方法都有效)
所有的部件都是采用ABS打印的3D打印,但可以使用任何其他材料,如PLA
步骤1:

将两个连杆臂(003)连接到三角形连杆(006)。
将M4圆头螺钉保持在内侧,如图所示,并将自锁螺母固定在外侧。
重要
我设计了所有关节孔非常精确,以便使用钻头使它们更加精确
要拧紧螺母直到锁定关节,然后必须将它们松开,直到在部件之间的间隙较小的情况下获得平滑运动。该规则是有效的,并且也适用于涉及使用自锁螺母的以下关节。
第2步:
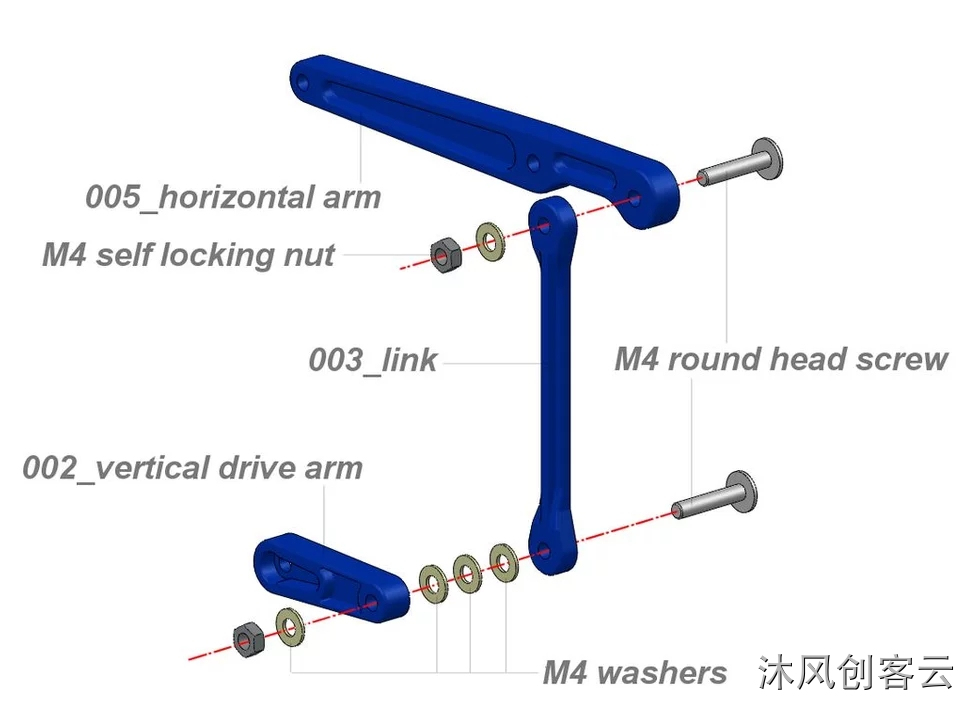
将连杆(003)连接到水平臂(005)的后关节。
如图所示,连杆(003)的下部与垂直驱动臂(002)连接。
在两个链节之间插入三个M4垫圈,这样可以更好地将它们与垂直臂对齐
将M4圆头螺钉固定在内侧,将自锁螺母固定在外侧
第3步:
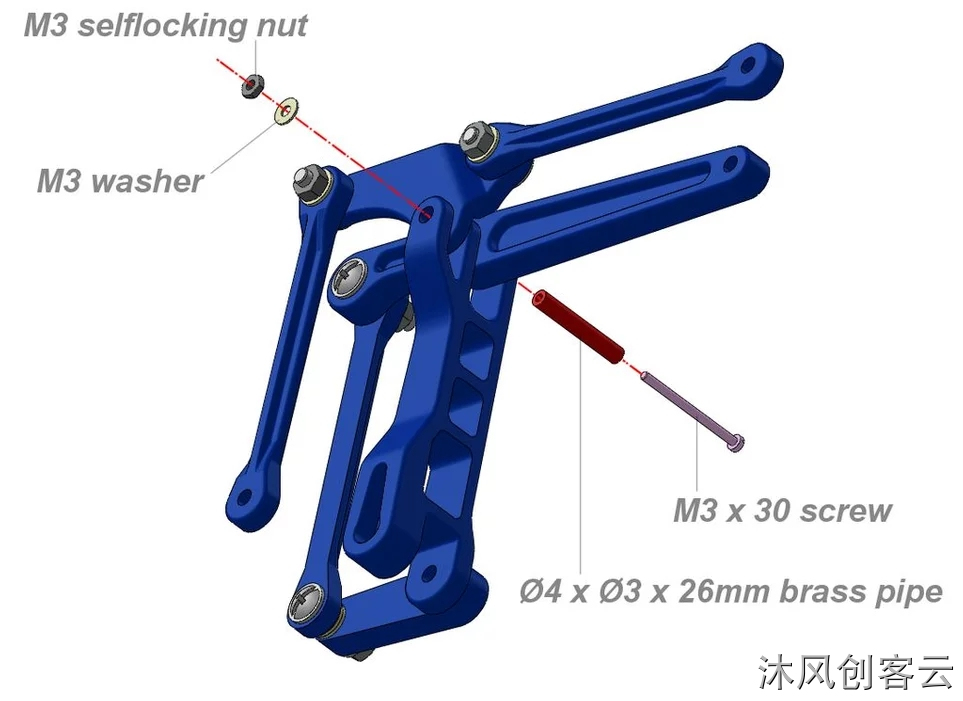
现在将两个预装配的链接连接到前驱动臂(004)。
平行位置水平臂(005)和三角形连杆(006)与前驱动臂(004)的上连接对齐。插入穿过所有部件的Ø4mm黄铜管并用M3x30螺钉固定,用另一侧的螺母锁定。
验证移动自由,如果一切正常,请继续执行下一步。
第4步:基础组装
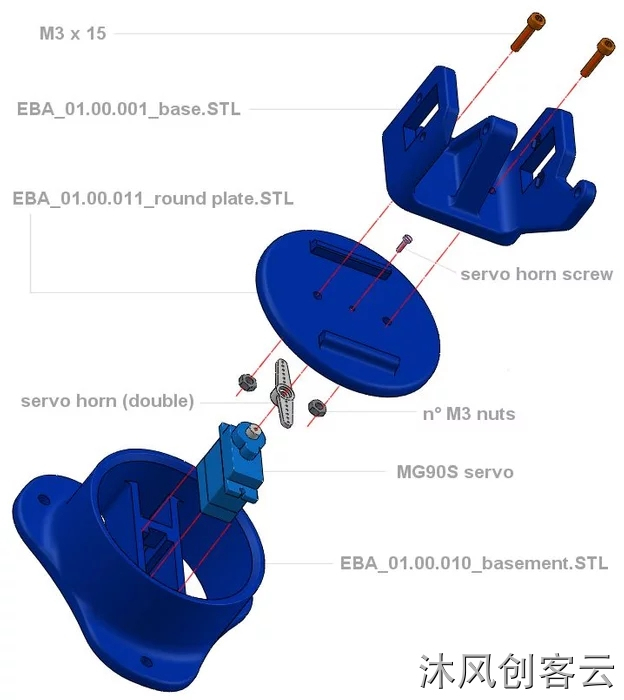
零件清单:
·n°1 EBA_01.00.001_base.stl
·n°1 EBA_01.00.011_round plate.stl
·n°1 EBA_01.00.010_basement.stl
·n°1 TowerPro金属齿轮MG90S伺服带双臂喇叭
·n°1伺服喇叭固定螺丝
·n°2 M3 x 15螺钉(VTCEI)
·n°3 M3螺母
第5步:
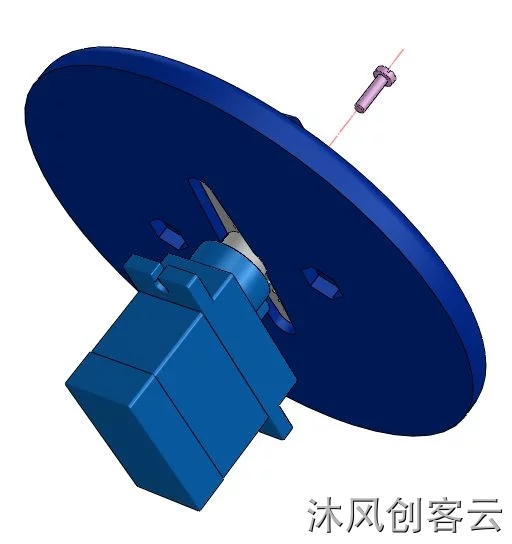
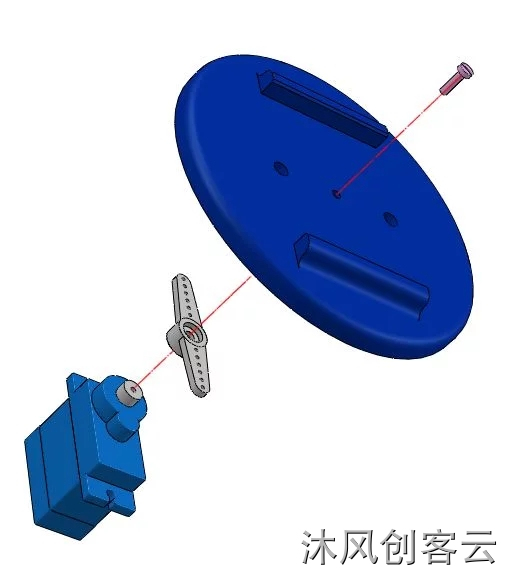
确保伺服机构处于空档位置,而不是将双臂喇叭安装在花键轴上,保持臂与伺服机构平行
将喇叭插入圆板下方的外壳内,并使用随伺服器提供的两个长螺钉中的一个将伺服器固定到板上(由于圆板的厚度,小的一个太短)
第6步:
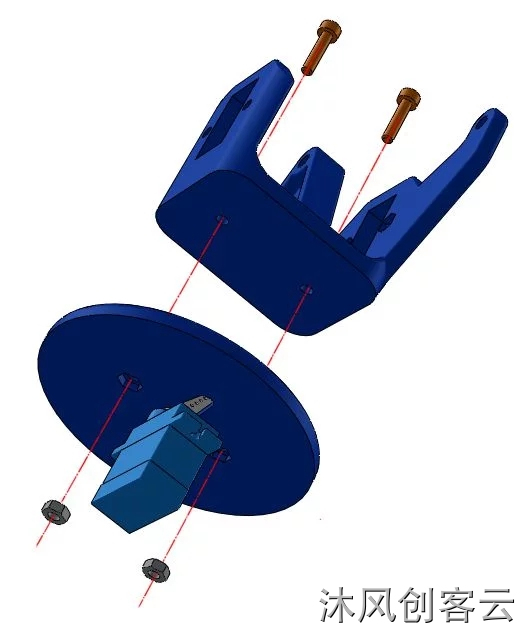

将底板安装在板上的两个肩部之间,并使用两个M3螺钉和螺母连接在一起。下方有两个六角形外壳,因此在拧紧过程中螺母将保持在适当位置
第7步:
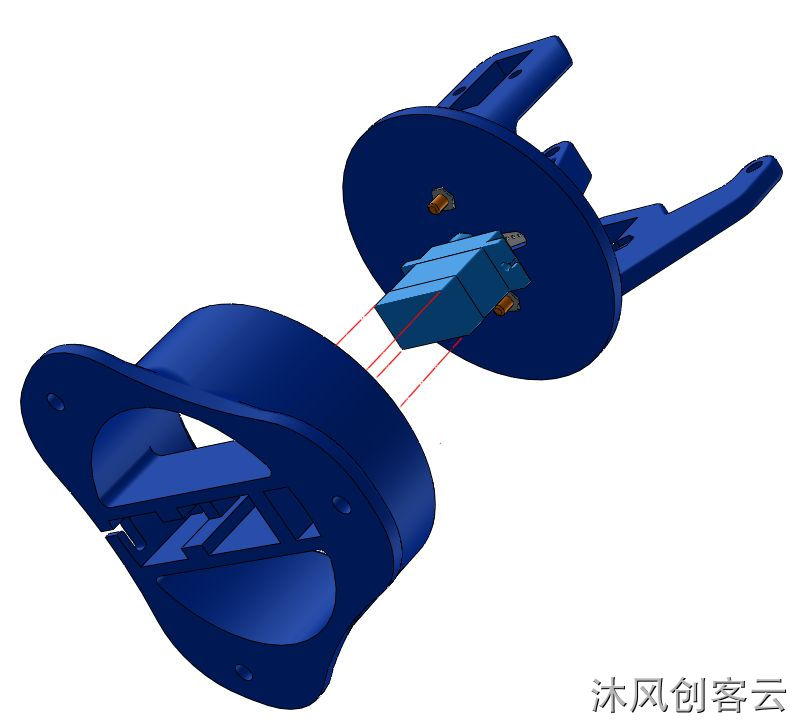

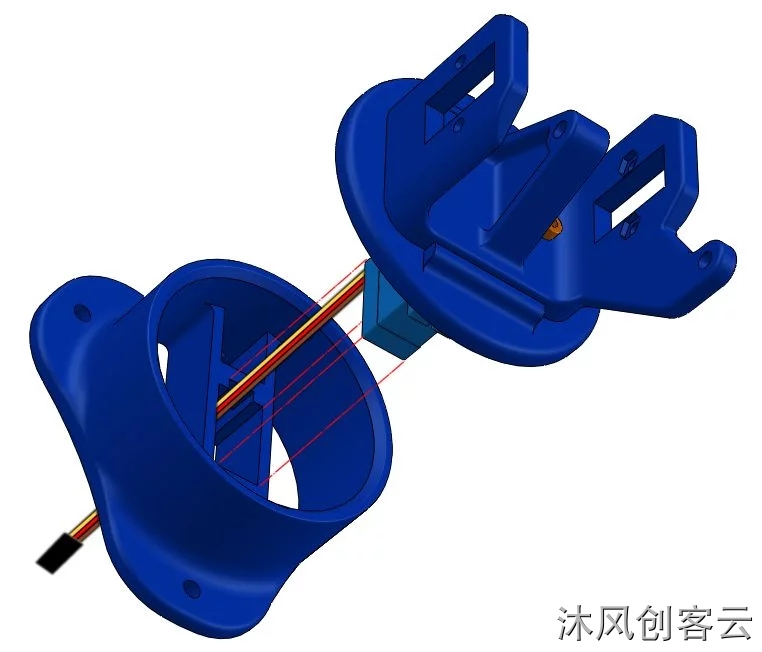
对准伺服并在地下室的中央部分引入接线。轻轻拉动导线使其平直,同时继续推入容纳伺服器的导线
然后将导线保持在适当位置,使其穿过前孔
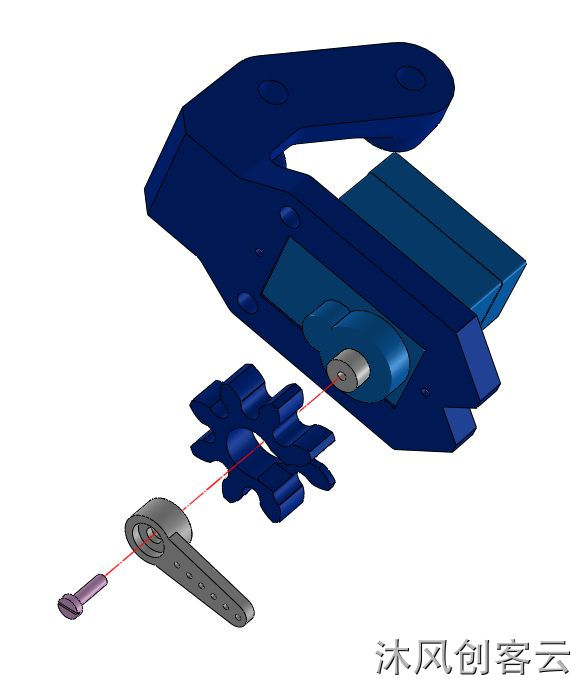
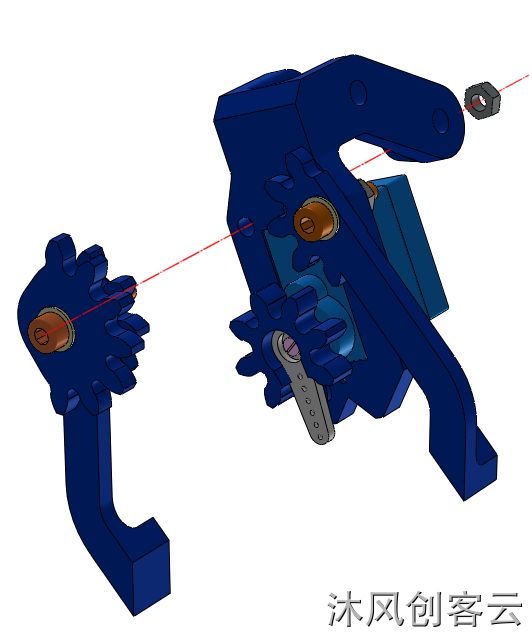
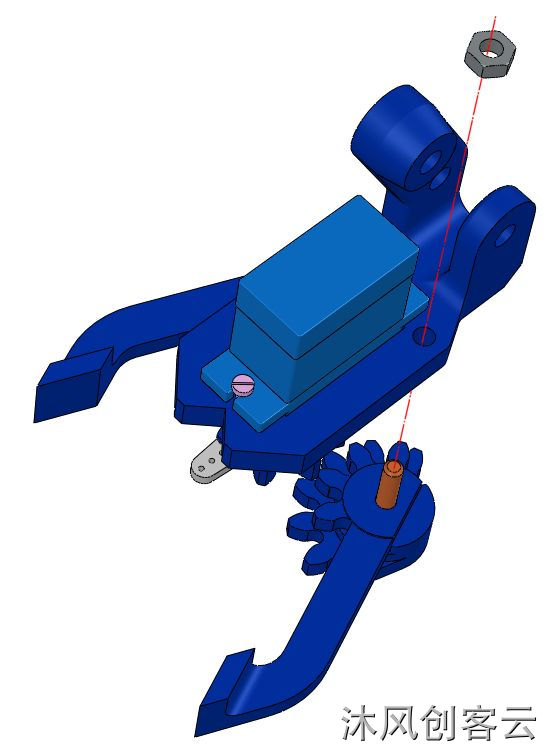
步骤8:夹持器组件

零件清单:
·n°1 TowerPro金属齿轮MG90S伺服(或SG90)带单臂喇叭
·n°1伺服喇叭固定螺丝
·n°1 EBA_01.00.012_claw support.stl
·n°1 EBA_01.00.015_drive gear.stl
·n°1 EBA_01.00.014_left finger.stl
·n°1 EBA_01.00.016_driven gear.stl
·n°1 EBA_01.00.013_right finger.stl
·n°2 M3 x 20螺钉(TCEI)
·n°3 M3自锁螺母
第9步:
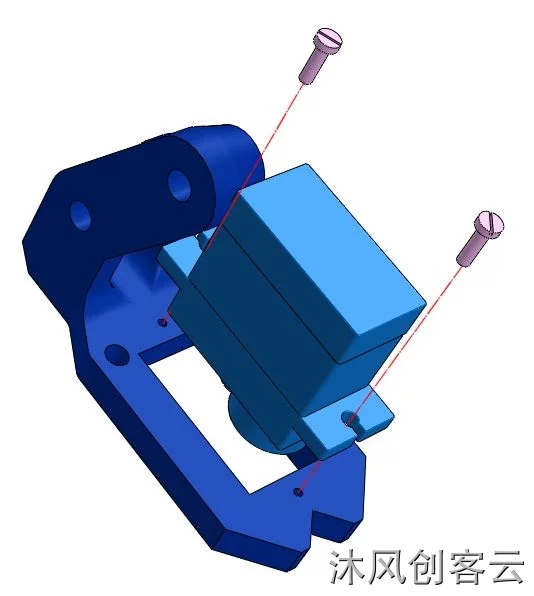
使用
随伺服器提供的两个固定螺钉将伺服器连接到爪支架上
保持输出轴前进
第10步:


将喇叭插入从动齿轮,然后使用提供的螺钉
将喇叭安装在伺服轴上。喇叭必须向前对齐,伺服在中间位置。使用切割器从齿轮上切下喇叭的超出部分
第11步:
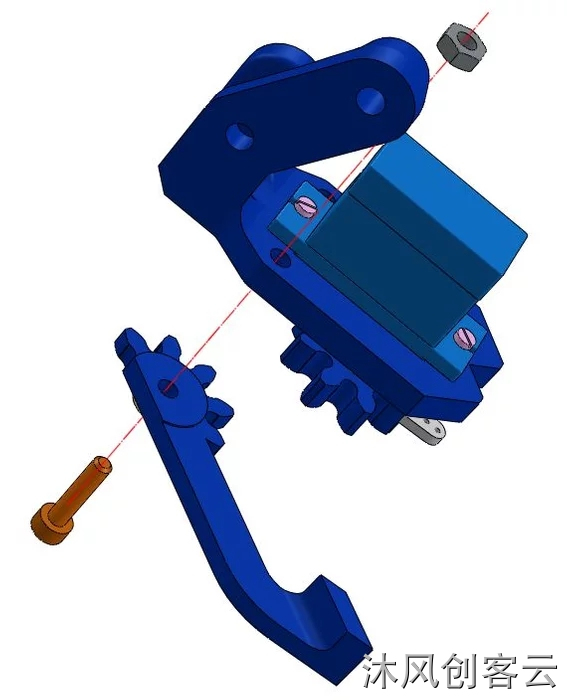
将M3螺钉插入中心孔,将其连接到爪支撑,然后拧紧自锁螺母,检查运动的自由度
第12步:
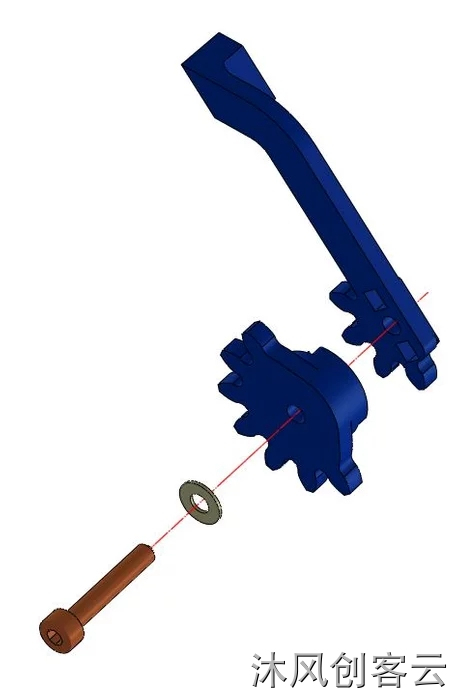
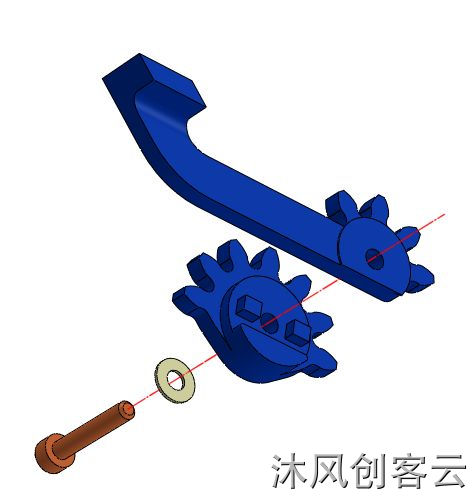
将从动齿轮的两个销钉插入左手指的专用孔中。从动齿轮还有一个肩部,必须与手指的侧面对齐。如果发现耦合困难,请使用文件减少干扰。
一旦连接,将M3螺钉插入中心孔并将手指连接到爪支撑件上
现在抓手已准备好安装在EEzybot的水平臂上
确保手动或使用伺服测试仪自由移动夹具
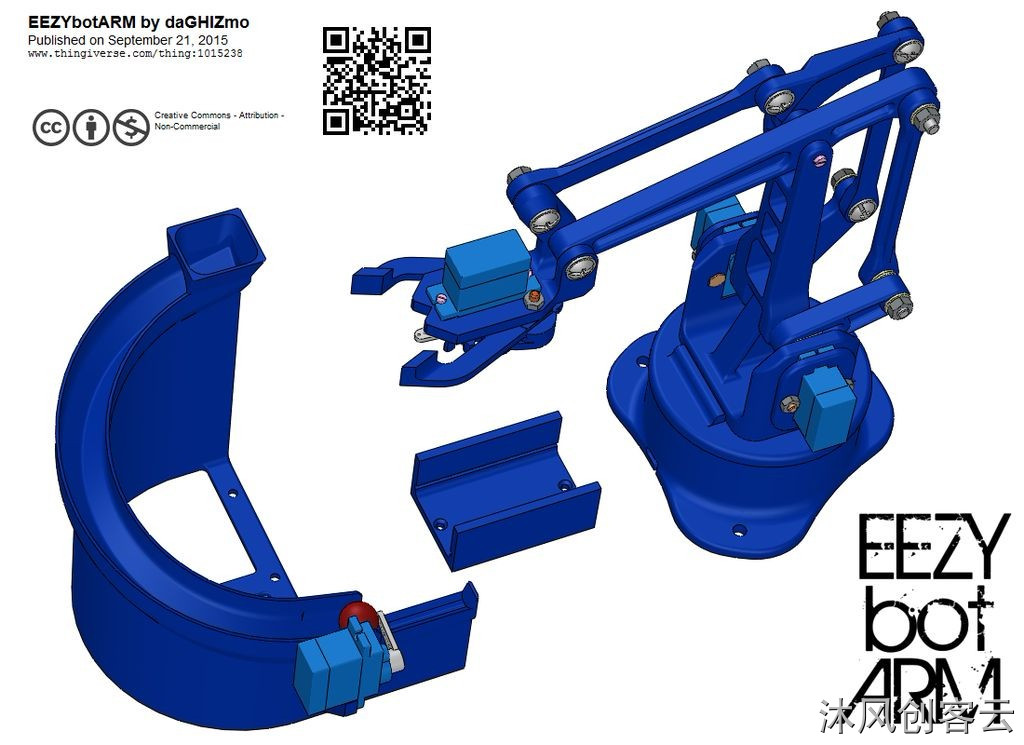
第13步:最终大会

现在我们有三个主要子组件准备相互连接。
下一步我们将与主臂一起加入基地
第14步:


将主臂与主臂连接,使零件轴线对齐,从一侧插入24mm长的黄铜管。
另外,驱动垂直运动的伺服短臂必须由黄铜管支撑,如图所示。
检查运动的自由度
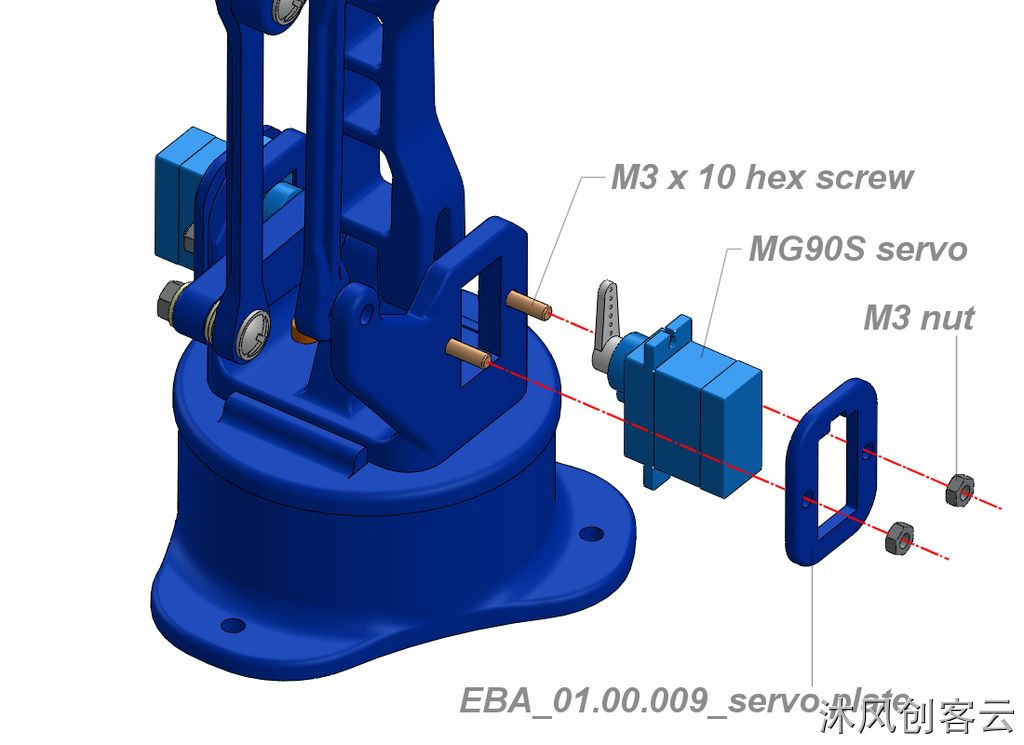
第15步:
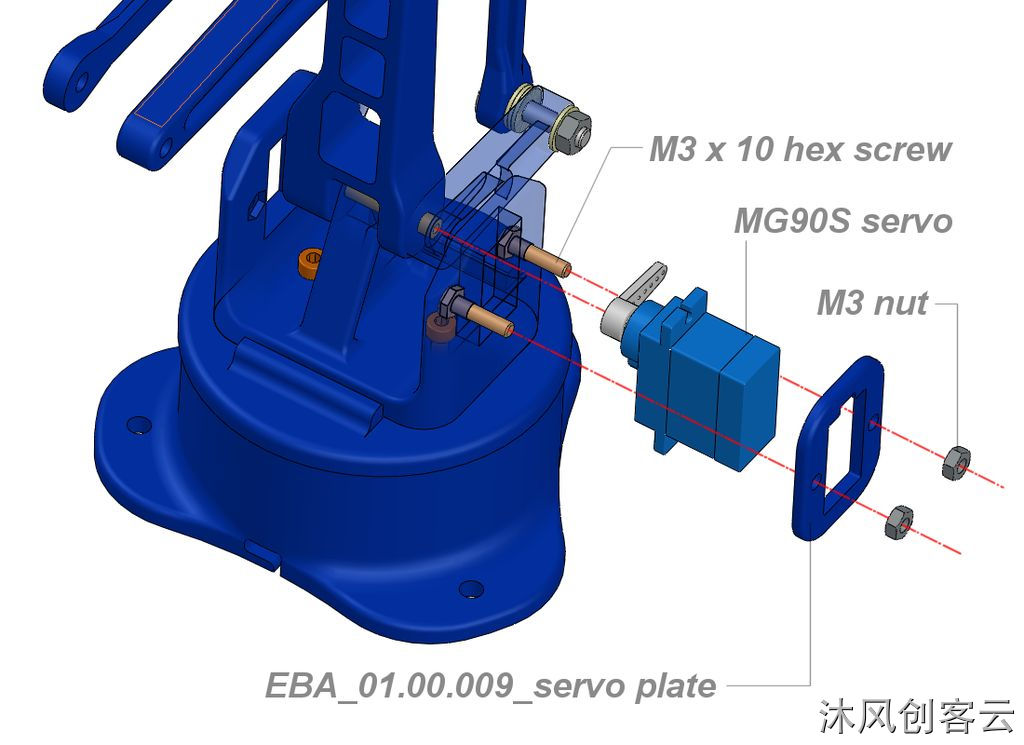
是时候安装伺服驱动臂的垂直运动了。在专用插座中放入两个M3x10六角螺钉。伺服必须处于中立位置,喇叭在右侧90度,安装压板(009)(使接线通过专用的放大)。
将瞄准器引入底板上的方形座中,并将喇叭滑入臂的形状外壳中,以驱动垂直运动。使用两个M3螺母将压板固定在伺服器上
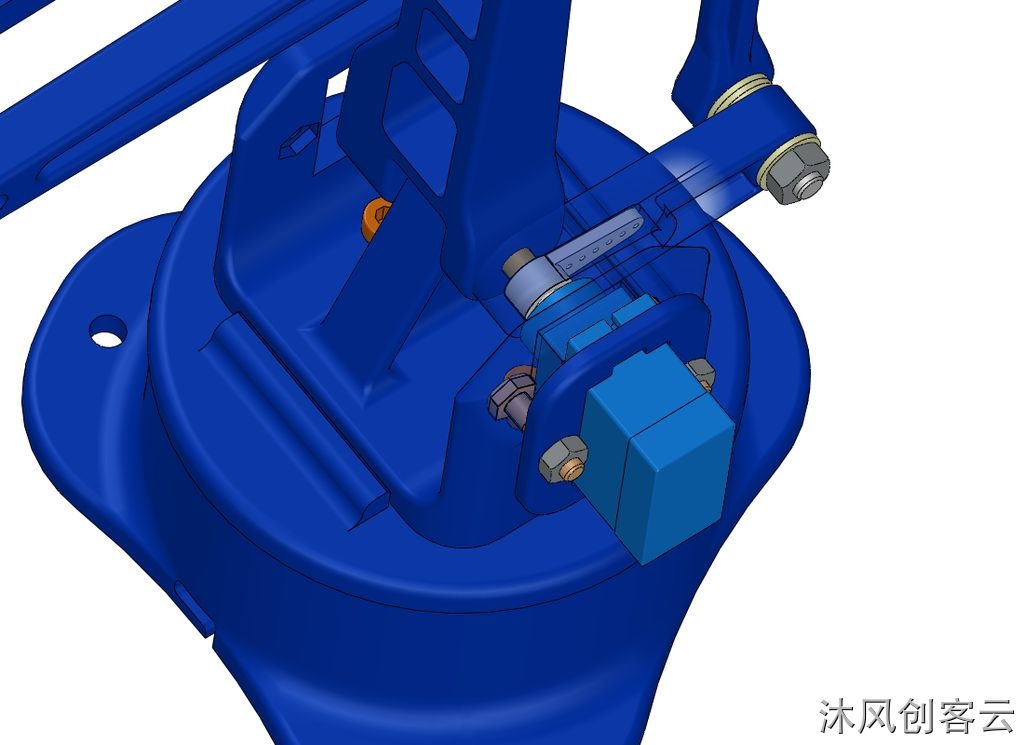
步骤16:Fwd / bckw驱动器伺服
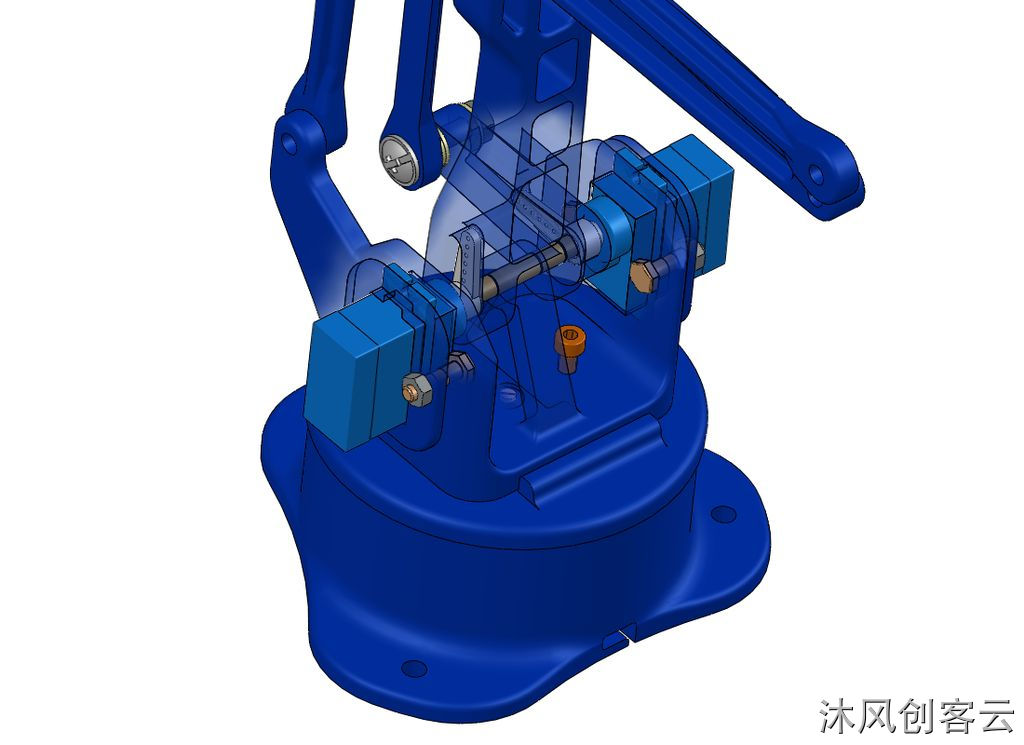
前后驱动伺服的顺序与前面的类似。在这种情况下,伺服喇叭必须安装在伺服中性状态下垂直对齐。
第17步:最后一个链接
使用M4x20垫圈和自锁螺母将最新的链接连接到底座后侧的固定臂
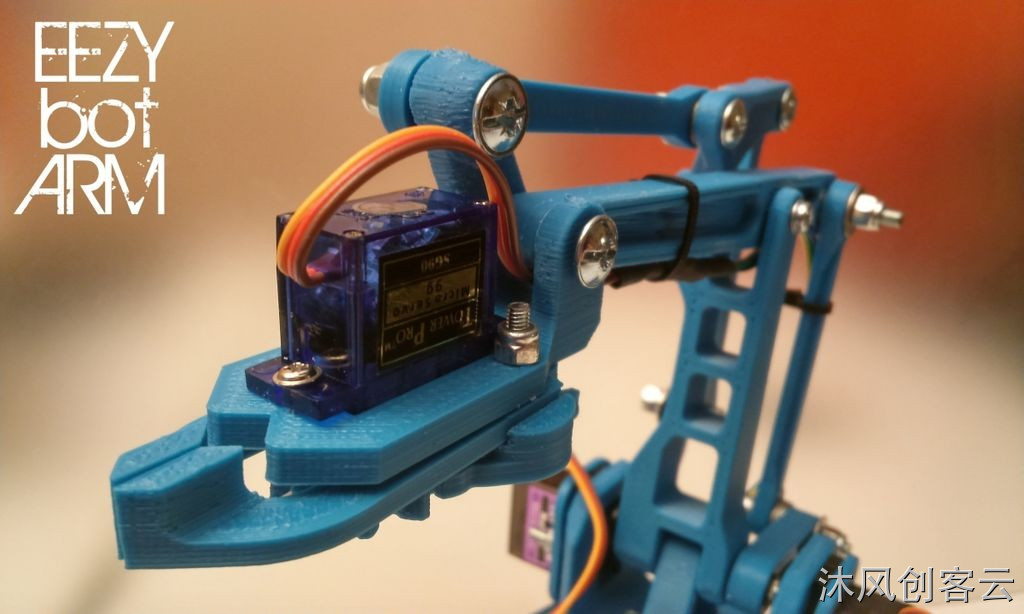
步骤18:安装夹具

最后的装配步骤是将夹具连接到水平臂上,如图所示。
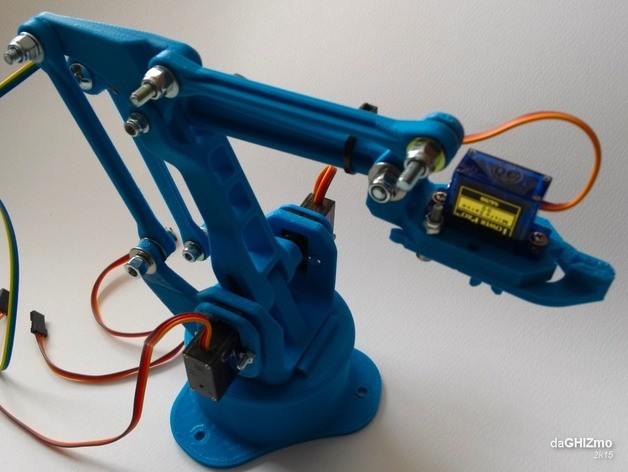
第19步:让它成功



在最后一步结束时,ARM已准备好工作。
作为一个可选项,在Thinghiverse可下载的3D模型中,我添加了一个圆形坡道,可以轻松获得带球的环路测试(显然是3D打印!)。在第一页上链接的视频中显示了我的意思。
要使此工具正常工作,您必须将另一个伺服(便宜的SG90)连接到斜坡的末端。我将斜坡中心保持在距离基础垂直轴约180mm的位置。
还有一个专用于Pololu USB伺服的支持的3D模型。
驱动伺服的方法有几个。我尝试了很多。要解释它将需要很多,而且这个教学是足够大的......如果我有时间的话,我可能会专注于新的教学。无论如何,如果你想探索,网上有足够的材料。
正如开头所说,我发现很容易使用Pololu USB伺服Mini Maestro,它不是很便宜但解决了很多问题。你必须安装驱动程序,软件,当连接到usb时,你也可以立即驾驶舵机选择速度和加速度。您可以将伺服位置存储到序列中,当准备就绪时,它可以播放一次或循环播放。也可以存储在内部脚本内存中,无需连接电脑即可自动播放。




 冀公网安备 13010402001320号
冀公网安备 13010402001320号