菲尔1008
已分享17份图纸


(1/4)机器人手臂

(2/4)EEZY机器人

(3/4)EEZY机械臂

(4/4)其中一步的安装步骤




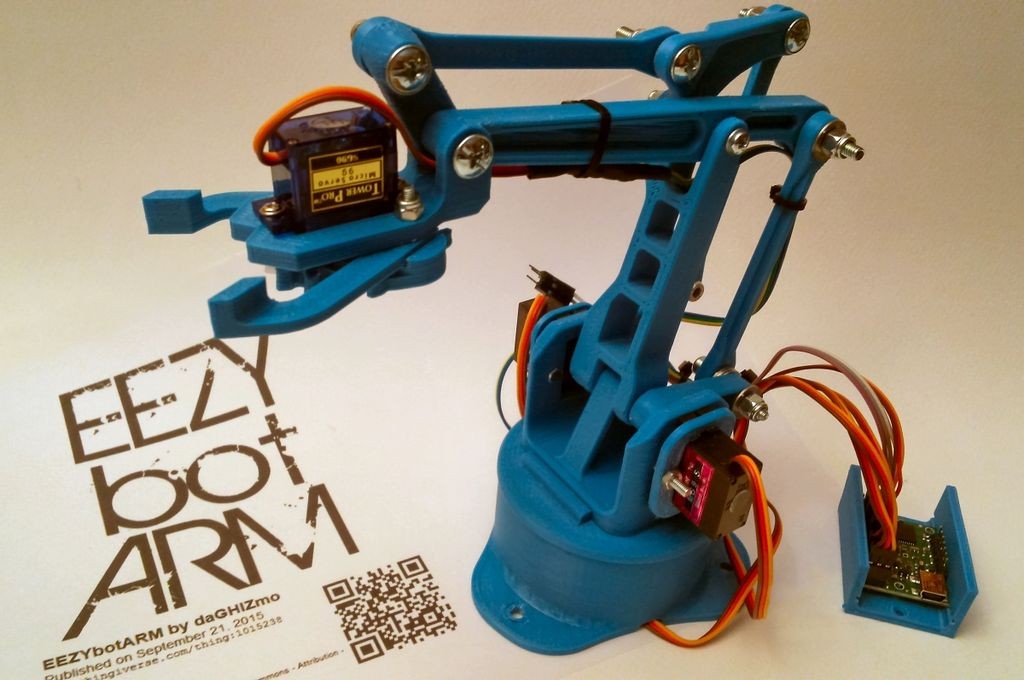
这是一个3DPrinted机器人手臂。设计意图是制作一些“易于”构建并且相当便宜的东西。它使用MG90S小型伺服系统来驱动运动学连接,使用Pololu mini maestro 12来控制伺服系统(其他任何控制方式)。所有的部件都是采用ABS打印的3D打印,但可以使用任何其他材料,如PLA
| 缩略图 | 名称 | 格式 | 大小(KB) |
|---|

CopyRight 2007-, mfcad.COM, Inc. All Rights Reserved
冀ICP备18014069号
 冀公网安备 13010402001320号
冀公网安备 13010402001320号